Blog
こんにちは。リサーチャーの深谷です。PFNではロボットのハードウェアについても積極的に研究開発を行っています。今回はその一つである汎用ロボットハンド、Hand type F1について紹介します。

図1 Hand type F1
ロボットハンドは何か目的とする動作を行うために鍵となる重要な部分です。このため現在まで数多くのロボットハンドに関する研究が行われると共に数多くの製品が販売されてきました。ただ、ロボットハンドといっても、利用目的によってその性質や構造は大きく異なります。
例えば複雑な動作を行う事を目的とするロボットハンドの場合、複数のアクチュエータやセンサを用いて指や関節を任意に動作させることで目的とする動作を実施します。これにより、例えば複雑な形状の物や柔らかく壊れやすい物などを把持することも可能ですが、製作コストが高くなりがちであると共に、動作時には各アクチュエータやセンサの制御を適切に行う必要があるなど、制御系への負担も増大します。
一方、工場の生産ラインなどでは少ないアクチュエータ数で安定的に動作するロボットハンドが好まれます。これは把持対象が予め決まっていることが多く、それらを確実に把持できるならば高度で複雑な動作は必要ではないためです。またアクチュエータや部品数が少なければハンドはそれだけ故障しにくく、製作コストも安くなるため、現場に導入する上で都合が良くなります。
よって私たちは単純で製作コストが安い構造でありながらも、汎用的に様々な物体を把持可能なロボットハンドについて開発を行っています。以下にその動作例を示します。
Hand type F1 の基本構造
このロボットハンドの特徴は、劣駆動で動作する指が1本のみ可動することです。この可動指は、向かい合うように配置した固定指と組み合わせて動作するように設計されています。指が1本しか動作しないと聞くと、動作性能はあまり高くないように感じられるかも知れません。確かに、指が1本のみしか動かない場合、できる作業は一部制限されてきます。例えば大きい物体を把持するのは得意ではありません。また物を掴む際は指先の姿勢を工夫する必要があります。ですが、こうした弱点を補うために効果的に作用するのが劣駆動による受動把持機能です。
把持動作
以下に受動把持機能を持つ1指駆動型ロボットハンドの動作例を示します。基本的な動作は可動指の根元にある関節(MP関節)に存在する入力部に駆動源から回転力を与えることで実施されます。指は伸びた状態のままMP関節を回転中心として駆動し、指の根元部が把持対象に接触した時点で指の他の2つの関節(DIP関節、PIP関節)が回転を開始します。そして指の各部位が対象物の形状に沿って曲がりながら接触していき、姿勢が確定した時点で指の屈曲動作は停止します。なお、可動指の先端のみが接触した場合であっても、屈曲動作は停止されます。これはヒトの摘まみ動作と同様の機能です。私たちが細い棒などを掴もうとする場合、指先のみに力を入れてつまみ上げようとします。このロボットハンドでは可動する指は1本でも同様の機能が再現されるように設計されています。この機構を採用したこと、入力部が1箇所に限定したことでロボットハンドは複雑な制御なしに様々な物を掴む事が可能です。

(a)小径物把持 (b) 小型角柱把持
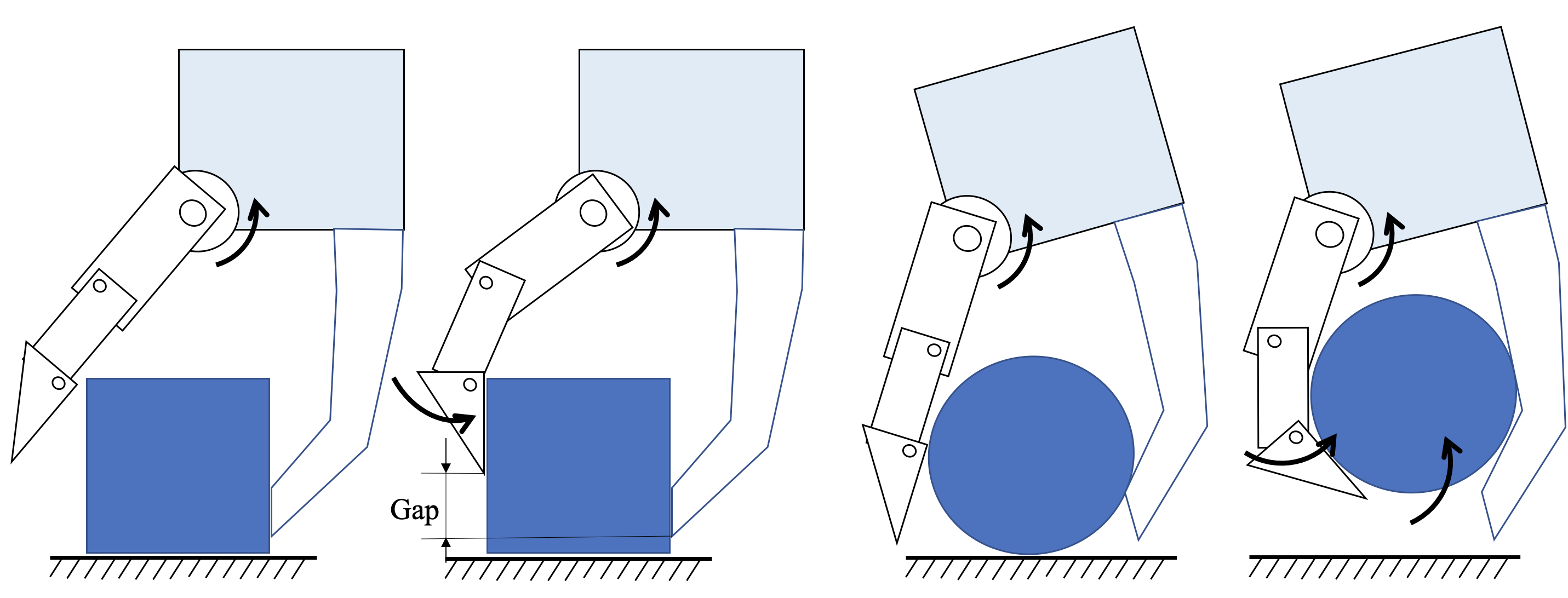
(c)大型角柱把持 (d) 円筒把持
図2 把持動作概略
可動指と固定指との関係性
固定指を有する構造は把持位置を推定するのに便利です。例えば図2(a)のように細い棒を掴む場合、固定指を棒の側に配置すれば、確実に対象を掴む事が可能です。また可動指は3関節で構築されているため、図2(b)や(c)のように形状が異なる角柱を把持する場合でも指先端部が把持対象の面に極力平行に接するように自動的に可動し、安定的な把持を可能とします。
なおこの時固定指と可動指との先端部にはギャップが生じることとなります。把持対象に高さがある場合、横幅が狭い場合はこのギャップの存在はさほど問題になりませんが、対象物の幅が広い場合などはギャップが大きくなるため把持の仕方に工夫が必要です。動画にも有りますが、薄いカード状のものを掴む場合は図2(d)のようにロボットハンドの姿勢を少し傾けることで固定指と可動指の先端位置を固定面に対し同様の高さに揃えることが可能となります。大型の円柱については、円柱の場合は可動指が巻き付くように自動的に動作するため、図2(d)のように安定的な位置まで円筒を引き上げて把持する事が可能となります。
即ち、一部の把持対象についてはロボットハンドに任意の傾きを与えるなどの工夫は必要となるものの、可動指が1本のみであっても、2本指型グリッパーのように働いて物体を把持することが可能となります。
固定指交換による機能拡張
またこの固定指を持つ構造は、作業内容や把持対象により柔軟に対応できる特性を有しています。例えば2指形状の固定指に変えれば簡易的に3指ロボットハンドのような機能を有するため、2指形状では不安定になりやすい球なども確実に掴む事ができます。
変わったところでは、ヘラ形状の固定指を与えることでハンバーグなどを掴んでひっくり返すなどの動作を行わせる事も可能です。

図3 ハンバーグの把持動作
実際の把持の様子
おわりに
このハンドは、固定指側を工夫する事で対応可能な作業を広げることが可能です。今後はハンドの実用化に向けて更なる改良を進めると共に、対応可能な作業の拡充を進めていく予定です。
関連記事
ブラックボックス最適化と物理シミュレーションを活用した劣駆動クローラを指面に持つ腱駆動ハンドの設計最適化 – PFN Research & Development Blog
Tag
#Robot hand
Area
Tag

