Blog
エンジニアの近藤です。第39回日本ロボット学会学術講演会にて公開した研究開発用モバイルマニピュレータSK01に関して、プロジェクトマネージャの鍋嶌の代理でご報告させていただきます。内容は講演会の論文を元にしたものとなっております。
背景と目的
2018年のCEATECにおいて、弊社は従来の物体認識・ロボット制御技術では困難だった「散らかった部屋の全自動お片付け」デモを行いました[1]。ロボットが、乱雑に置かれた洋服、おもちゃ、文房具など、家庭にある様々な物体を認識してつかみ、所定の場所に片付けると同時に、口頭やジェスチャーによる人からの片付け指示に従うなど、機械学習、人工知能、ソフトウェア・エンジニアリングにおける弊社の強みが活きるデモでした。
CEATECのデモでは、トヨタ自動車製のモバイルマニピュレータHSRを利用しましたが、さらなる研究開発を行うために、HSRより広い到達可能範囲、可搬質量が必要となりました。また、マニピュレータの運動制御まで研究開発の範囲に含めようと考えたため、研究開発用のモバイルマニピュレータを開発することとなりました。本報告では、弊社が開発した研究開発用モバイルマニピュレータSK01の設計コンセプトおよび、安全面の配慮について紹介します。
全体システム
システム概要
SK01の外観と諸元を図1および表1に示します。

図1 モバイルマニピュレータSK01
表1 SK01の諸元
|
サイズ |
高さ:0.9 m〜1.65 m 幅:0.6 m |
|
質量 |
80 kg |
|
電源 |
Li-ion二次電池(24V) |
|
軸数 |
|
|
到達可能範囲 |
|
|
TCP速度 |
1 m/s(typ) |
|
可搬質量(アーム) |
3 kg(エンドエフェクタ含) |
|
エンドエフェクタ |
エンドユーザが交換可能 |
|
巡航速度 |
2 km/h (max) |
|
移動性能 |
段差 5 mm 斜面 5度 |
|
稼働時間 |
8 h(cont, typ) |
|
安全性 |
ISO 13482, ISO 13849-1, PLc, JIS B 8446-4(策定中)準拠 |
SK01は、人の共存環境で、人の代替となるタスクを広く行えるよう、以下の特徴を有するプラットフォームとして設計しました。
- 床下から棚まで、人の作業空間を広くカバーする到達範囲
- 人が日常的に運搬作業するレベルの可搬質量
- バリアフリー環境を走行可能な移動性能
- 様々なアーム姿勢でもビジュアルサーボを可能にするカメラ搭載サブアーム
- タスクに応じてエンドユーザが交換可能なエンドエフェクタ
- 各種安全規格(策定中含む)に準拠した設計
想定アプリケーション
2020年初頭からの新型コロナウイルス感染症の状況を鑑みて、自動清拭消毒をSK01の想定アプリケーションとしました。
感染症拡大を防止する基本的な方法は標準予防策の徹底です[2][3]。不特定多数の患者(疑い含む)を検査・治療する医療機関では、医療従事者や他の患者への感染防止のために、院内の環境表面(高頻度接触面、床、壁、トイレなど)と物品表面を頻繁に消毒します。新型コロナウイルス対策では、患者が部屋を出る時、物品が病室を出る時に、看護師が都度アルコールで清拭消毒しており、身体的、心理的、時間的、経済的な負担となっていました。
ロボットによる作業代替によって、この負担を軽減できる可能性があります。また、人手が少ない夜間・休日に対応できる、手が回らなかった箇所の消毒が行える、医療従事者の危険源への暴露時間を低減し、防護服を節約できるといった利点も考えられました。
機械システム
設計コンセプト
弊社のソフトウェア開発能力を活かした機械設計をコンセプトとしています。リンク機構の剛性およびアクチュエータの性能に関しては、従来の産業用ロボットやAGVのレベルまでは求めず、可能な限りソフトウェア技術で補完することとしました。またソフトウェア技術を有効に活用するために、サブアームによる情報補完やエンドエフェクタの着脱等の機構を採用しています。
安全
JIS B 9711に準じて、原則として可動部隙間が8 mm以下または25 mm以上となる設計としました。また、手先可動範囲は人の作業空間に近い設計としています(図2)。
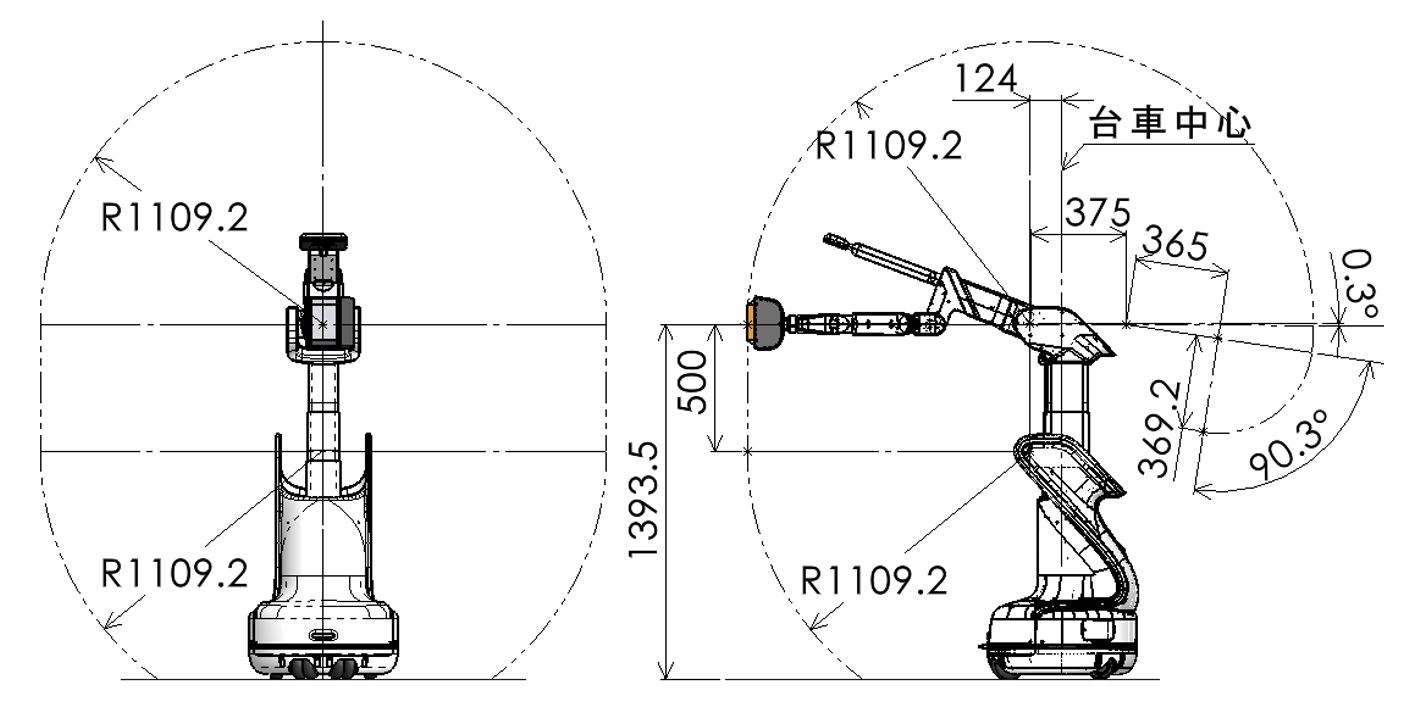
図2 SK01の到達範囲
ユニット設計
医療機関などでのPoCや各種試験を行うことを想定し、搬送作業を簡便にするために容易に分離・組立できる設計としました。運搬時には3つのユニット(アーム、昇降、台車)および外装カバーに分割可能とし、各ユニットは最大でも30 kg以下としたことで、成人男性2人で運搬可能となりました。また、梱包状態から2人作業で15分程度にて組立可能です。以下に各ユニットの詳細を述べます。
アームユニット
アームユニットは、マニピュレーション用のメインアームと、ビジュアルサーボ用のサブアームから構成されます。
メインアームは、想定アプリケーションに対応するために本体の旋回・後述の昇降軸を含めて7自由度の構成としました。サブアームには、ビジュアルサーボ用にエンドエフェクタやARマーカなどを認識可能なカメラが搭載されています。サブアームはメインアームの根元ではなく、途中から分岐することで少ない自由度でエンドエフェクタを視野内に入れることが可能となっています。
アクチュエータは、同じモータドライバ基板で制御可能な3サイズを設計しました。図3に最小サイズのアクチュエータ特性を記します。自動清拭のアーム動作において、産業用ロボットのような高速な繰返し速度ではなく、人間と同等の作業を意図した設計としました。

図3 最小サイズのアクチュエータ特性
昇降ユニット
人の清拭作業は低所から高所におよびます。人のかがみ動作に相当する可動範囲を獲得するために専用の昇降ユニットを開発しました。また、昇降ユニット下方部に旋回軸を設けることで疑似的な全方位移動が可能な構成としました。さらに、後述のナビゲーション用に本体前面下部および背面にカメラを搭載しています。
台車ユニット
台車ユニットは人との共存環境での移動を想定して、最大巡行速度2 km/時、段差5 mm・傾斜5度の踏破性能としました。各車輪には荷重センサを内蔵しており、ロボットの重心を検出することで転倒防止制御が可能です。さらなる安全対策として、崖センサおよびバンパセンサを搭載しています。
エンドエフェクタの脱着システム
エンドエフェクタの脱着システムには、アクチュエータおよびセンサを備えたエンドエフェクタを装着できるように、チャック機構に加えて通信・電源供給機能を搭載しました。これにより、自動清拭消毒用ハンドに加えて、弊社リサーチャの康が開発したグリッパーHand type A [4] などを搭載可能です(図4)。

図4 左: 自動清拭消毒用ハンド、右: Hand type A [4]
電気システム
SK01の電気システムは、上位システムが動作する小型PCを中心に、PCから電気システムへの通信インタフェースと電源マネジメントを提供するペリフェラル基板、2軸単位で最大500 W出力が可能なBLDCモータドライバ基板、USBのカメラ・Depthセンサ・マイクアレイのほかサブアームを駆動するサーボモータのインタフェースを備えたマルチメディア基板により構成しました。
5枚のモータドライバ基板で、台車の2軸、アームの7軸、および、エンドエフェクタ着脱用のコンプレッサの合計10軸を駆動し、これらは制御系となるCAN-FDを用いてペリフェラル基板を介してPCに接続します。また、マルチメディア基板は別系としてUSBでPCに接続しました。エンドエフェクタに対してはスプリングコンタクトを通じて、給電のほか、USB接続を提供します。
モータドライバ基板では、制御用マイコンと独立したウォッチドッグタイマとキャパシタバックアップによるショートブレーキを備えています。また、台車用のモータドライバ基板にはバンパセンサおよび崖センサのためのインタフェースを備えた。4つのロードセルは、転倒防止制御などを実現するために毎秒1,000サンプル以上のサンプリングレートで読み出すことができます。
ソフトウェアシステム
システム概要
本システムはマイクロコントローラ上で動作する下位ソフトウェアシステムと、小型PC上で動作する上位ソフトウェアシステムに分かれています。上位と下位のシステム間はCAN-FDで接続されています。
下位システム
下位システムはモータドライバの制御の他に、マルチチャンネルマイクロフォン、スピーカ、LEDの制御、電源管理などを行います。実時間性や機能安全に関わるすべてのソフトウェア機能はこの下位システムが受け持ちます。
上位システム
上位システムはアプリケーションの実装に用いられます。開発基盤にはオープンソースソフトウェアであるROS(Robot Operating System)[5] を採用しました。全身動作計画、地図生成、ナビゲーション、マーカ認識、ジョイパッドによる遠隔操作などの基本機能を有しています。ナビゲーションは自社開発の技術 [6]を本システムにも利用しました。
後述する自動清拭消毒作業は、これらの基本機能の上に実装しています。
自動清拭消毒動作
実験方法
病院内で患者との接触可能性が高く、清拭作業により多くの労力を必要とする机と壁の清拭消毒の実現性を検証しました。ロボット手前の机と右手前の壁を清拭する設定としました。
清拭領域の位置姿勢の認識には机と壁に貼り付けたAprilTag [7] (以下マーカ) を用いました。清拭動作は、マーカで得られた位置姿勢から一定量オフセットした原点を中心とする2次元矩形領域を対象とします。この矩形領域を左上から右下に向かって少しずつ拭く領域をずらしながら往復して清拭作業を行うよう動作計画を行いました。机から壁への移動を含めて、自律的に動作するシーケンスを実装しています。
実験結果
机と壁の自動清拭消毒動作の様子を示します。
実験では、適切にマーカを認識し、それをトリガーとした自律動作生成が行えました。机の清拭、机から壁への移動、壁の清拭は、約2分で完了しました。
人間が同じ動作を行った場合30秒から1分ほどかかることから、人間の1/4倍から1/2倍の速度で自動清拭消毒が行えたことを意味します。
考察
今回の検証実験では、作業時間の半分ほどは清拭動作と自律移動の間の切り替えに伴う予備動作に費やされていました。この予備動作を含めた動作計画を行うことや、予備動作の完了を待たずに自律移動を開始することなどを組み合わせることで作業時間の大幅な短縮が見込まれます。
また、今回は検証実験の簡略化のためにマーカによる清拭領域の認識を行いましたが、カラーカメラと深度センサを用いた物体認識による自動的な清拭領域の認識に課題が残ります。
安全性
最終的なユーザだけでなく、開発者・実験者も保護する目的で、開発初期よりISO 13482に準拠することとし、リスクアセスメントベースの開発を行ってきました。開発チーム内だけでなく、第三者認証機関による設計レビューを利用し、抜け漏れを極力排する工夫をしています。
モバイルマニピュレータに特有のハザードとして、a) 稼働時又は電源喪失時に生じるマニピュレータの人への衝突、b) 稼働時の転倒が挙げられます。ISO TS 15066を参考にし、これらのリスクレベルを見積ったところ、SK01の設計は本質的に安全なレベルにあると判断できました。移動ロボットとしての衝突安全性は、JIS B 8446-1を参考にしています。
より安全性を高めるために、システムレベルの設計FMEAを実施しました。システムを構成する各コンポーネント、配線について故障モードを想定し、単一故障安全となる設計を施しました。崖を検知した時の車輪の停止機能は、ISO 13849-1のPLcの信頼性が要求されると判断されたため、PLcを満たす設計としました。
SK01のリスクアセスメントおよび安全設計で得られた知見は、策定中のJIS B 8446-4に活かされています。
まとめ
弊社では、自社の研究開発用プラットフォームとなるモバイルマニピュレータSK01を開発しました。機械システム、電気システム、ソフトウェアシステムを融合的に開発し、安全性を含め、自動清拭消毒アプリケーションが可能な全体システムとして仕上げることができました。
SK01は、マーカを利用した動作指示のもと、自律的に清拭動作と移動を行うことができました。よりチューニングを行うことで、人と同等の作業速度が達成できると考えられます。
SK01は研究開発用であり、製品化は行わない見込みですが、システム構成、インテグレーション方法、安全性への配慮などが、今後同様のアプリケーションを意図した製品を開発する事業者の参考になれば幸いです。
謝辞
本研究開発は、グローバル・スタートアップ・エコシステム強化事業費補助金(ものづくりスタートアップ・エコシステム構築事業)、および、筑波大学T-CReDOの次世代医療機器連携拠点整備等事業(臨床現場観察実習)の支援を受けました。
参考文献
- [1] 株式会社Preferred Networks: “CEATEC Japan 2018でパーソナルロボットシステムを初公開、全自動お片付けロボットシステムを展示,” https://projects.preferred.jp/tidying-up-robot/, 2018.
- [2] 厚生労働省, “感染症法に基づく消毒・滅菌の手引き,” 2018.
- [3] WHO Headquarters (HQ): “Cleaning and disinfection of environmental surfaces in the context of COVID-19”, https://www.who.int/publications/i/item/cleaning-and-disinfection-of-environmental-surfaces-inthe-context-of-
- covid-19, 16 May 2020, Accessed: 12 June 2020.
- [4] 株式会社Preferred Networks: “ブラックボックス最適化と物理シミュレーションを活用した劣駆動クローラを指面に持つ腱駆動ハンドの設計最適化,” https://tech.preferred.jp/ja/blog/hand-type-a/, 2020.
- [5] M. Quigley et al.: “ROS: an open-source Robot Operating System,” IEEE ICRA workshop on open source software, pp. 5-10, 2009.
- [6] 株式会社Preferred Networks: “建築現場用ロボット向けにAI技術を搭載した自律移動システムを開発,” https://www.preferred.jp/ja/news/pr20210304/, 2021.
- [7] M. Krogius, A. Haggenmiller and E. Olson: “Flexible Layouts for Fiducial Tags”, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1898-1903, 2019.

Area
Tag